# Aircraft Settings
Aircraft settings are generally controlled on the H145 tablet, inside the Aircraft app.
# H145 Tablet Setup
Settings have changed starting in Build 450. Skip to the section below.
The tablet has a new set of settings for the native flight model. Open the tablet -> Aircraft (app) -> Setup (page).
Setting | Description |
|---|---|
Aircraft DamageOnor Off | This setting controls the built-in damage model which impacts the aircraft engines, systems and flight model. |
Gameplay ModeRealisticor Arcade | The Arcade mode will not allow over-torque on the collective, the FLI limit will be automatic. |
Vortex Ring StateOnor Off | The On mode will enable a realistic VRS simulation which will cause loss of rotor lift. |
# Cyclic Control Settings
Setting | Description |
|---|---|
Cyclic ControlNo-Springsor Centering-Springs | The Centering-Springs setting is intended for joysticks with a centering spring. The aircraft trim position will be approximated so the joystick is always centered to maintain the current flight condition.The No-Springs setting requires you to deflect the cyclic as the aircraft moves into cruise, or you may take advantage of the center-displacement binding. |
SAS Stability Level-100 to +100 | This slider controls the relative stability of the SAS. If you have a full cyclic with a long extension, you may prefer values at approximately -75. If you have a joystick, the default value of 0, and for game controllers a value of +100 may be preferred. This setting is mainly to compensate for different controllers. Avoid settings lower than -80 as they are unrealistically destabilized. |
Deadzone1 to 100 | This slider controls the size of the deadzone which is used to determine HANDS ON detection. This setting should be as low as possible such that when releasing the controller, HANDS ON is reliably not displayed. |
Follow-Up TrimOffOnly HoverOnly CruiseBoth | Follow-Up trim will enable you to avoid using trim release for some cyclic manipulations. Hover domain is defined as less than 30 knots airspeed. Trim Release is preferred to depending on follow-up trim. |
AFCS OverrideDual InputAutopilot only | Changing to Autopilot only will prevent any input from the cyclic when in ATT mode or any upper mode. This setting is intended for users that lack a friction lock and also lack a spring on their cyclic. This setting allows use of the AFCS by using beep trim and Trim Release. |
| Center Displace Reset Time | This setting applies only to H:H145_SDK_CYCLIC_FORCE_TRIM_DISPLACE_CENTER Cyclic Control - Displace Cyclic Center (Force Trim) and controls how long to wait before reconnecting the user flight controls. |
# Tail Rotor Control Settings
Setting | Description |
|---|---|
Tail Rotor ControlCentering-Springsor Legacy | The Centering-Springs setting is designed for pedals with and without springs, and enables yaw stabilized when in hoverThe Legacy setting has free yaw pedals, which is not as realistic. |
SAS Stability Level-100 to +100 | This slider controls the relative stability of the yaw SAS. It will be easier to hold a heading in hover with a higher value. This setting is mainly to compensate for different controllers. Avoid settings lower than -80 as they are unrealistically destabilized. |
Deadzone1 to 100 | This slider controls the size of the deadzone which is used to determine FEET ON detection. This setting should be as low as possible such that when releasing the controller, FEET ON is reliably not displayed. |
# Collective Control Settings
Setting | Description |
|---|---|
SAS Stability Level-100 to +100 | This slider controls the relative stability of the collective SAS. It will be easier to hold height over the ground in hover with a higher value. This setting is mainly to compensate for different controllers. Avoid settings lower than -80 as they are unrealistically destabilized. |
| Step Size (Keyboard) | This setting applies only to button/keyboard collective inputs. It will control how large the response of the collective for each button press. |
# Setup (V2)
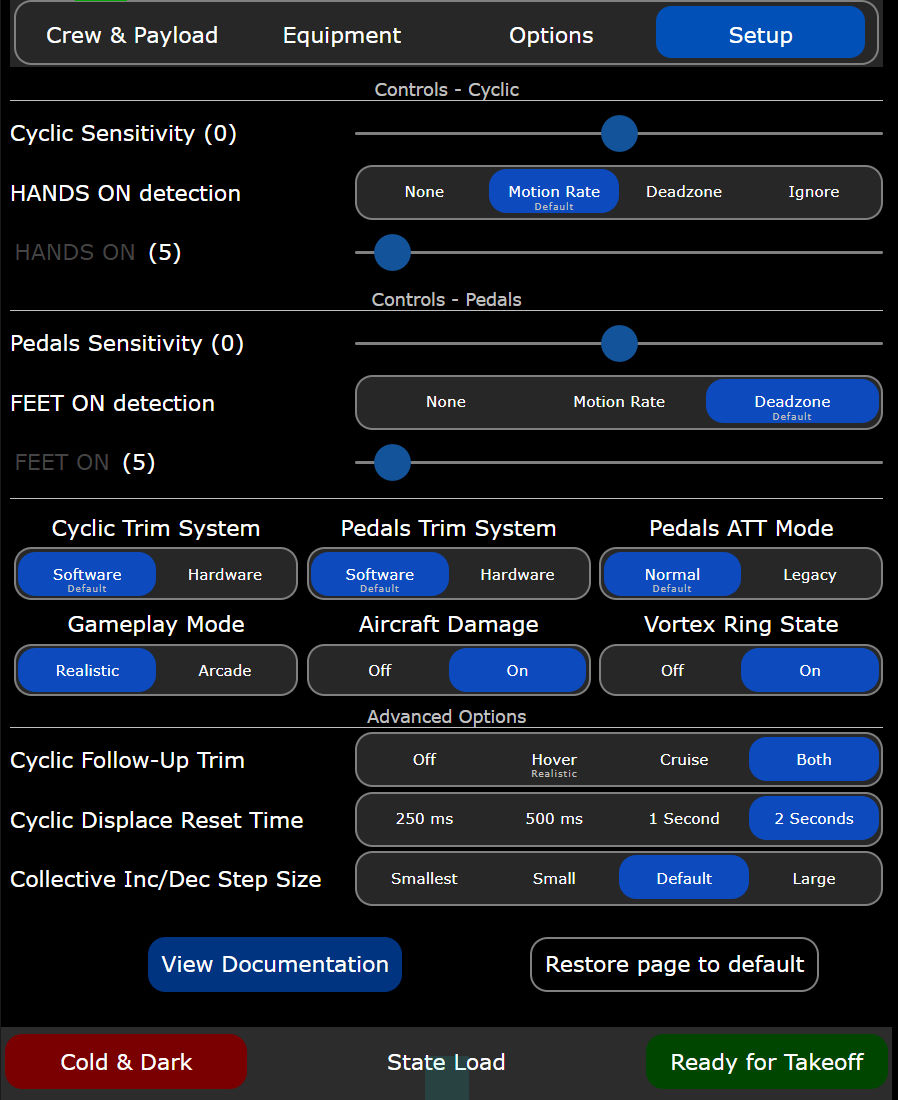
The below settings apply starting with build 450.
# Cyclic Sensitivity
This setting is essentially the same as the MSFS Controls Sensitivity setting.
# HANDS ON detection
This setting controls the HANDS ON detection strategy. The slider below corresponds to the threshold relative to the selected strategy.
| Strategy | Description |
|---|---|
| None | Used for Force-Feedback controllers. In this mode there is no HANDS ON detection unless L:FFB_HANDS_ON_CYCLIC=1. |
| Motion Rate | Used for any controller. Detection is based on rate of motion. The slider will adjust the relative motion rate which triggers detection. |
| Deadzone | Used for any controller. Detection is based on the deflection of the stick exceeding a specific threshold, which is set by the slider below. |
| Ignore | Used for controllers without sufficient ability to hold a position. In this mode the cyclic is completely ignored when using AFCS upper modes. |
# Pedals Sensitivity
This setting is essentially the same as the MSFS Controls Sensitivity setting.
# FEET ON detection
This setting controls the FEET ON detection strategy. The slider below corresponds to the threshold relative to the selected strategy.
| Strategy | Description |
|---|---|
| None | Used for Force-Feedback controllers. In this mode there is no FEET ON detection unless L:FFB_FEET_ON_PEDALS=1. |
| Motion Rate | Used for any controller. Detection is based on rate of motion. The slider will adjust the relative motion rate which triggers detection. |
| Deadzone | Used for any controller. Detection is based on the deflection of the stick exceeding a specific threshold, which is set by the slider below. |
# Cyclic Trim System
This setting controls whether there is a virtual trim (good for controllers with springs) or a hardware trim (good for Force-feedback controllers).
| Strategy | Description |
|---|---|
| Software | The virtual trim point is visible on the VMS CTRL page as a blue cursor. It will move slowly to follow the stick and relax any forces. |
| Hardware | The virtual trim is disabled, Force-Feedback controllers are likely in use. |
# Pedals Trim System
This setting controls whether there is a virtual trim (good for controllers with springs) or a hardware trim (good for Force-feedback controllers).
| Strategy | Description |
|---|---|
| Software | The virtual trim point is visible on the VMS CTRL page as a blue cursor. It will move slowly to follow the pedals and relax any forces. |
| Hardware | The virtual trim is disabled, Force-Feedback controllers are likely in use. |
# Pedals ATT Mode
This setting is provided for compatibility with previous usage.
| Strategy | Description |
|---|---|
| Normal | ATT mode will stabilize and hold heading in hover. |
| Legacy | ATT mode will not stabilize and hold heading in hover. |
# Gameplay Mode
This setting provides an easier flight model for users with less comprehensive hardware.
| Strategy | Description |
|---|---|
| Realistic | Realistic SAS implementation. |
| Arcade | Heavy-handed SAS implementation. |
# Aircraft Damage
This setting configures the wear and damage model for the aircraft.
| Strategy | Description |
|---|---|
| Off | No damage. Check that your MSFS damage is also turned off. |
| On | Engine damage, IBF clogging. |
# Vortex Ring State
This setting configures the VRS model on top of the MSFS flight dynamics. VRS is a dangerous condition where lift is lost.
| Strategy | Description |
|---|---|
| Off | VRS model is not active. |
| On | VRS is active, avoid descent below 500fpm when below 20kias. |
# Cyclic Follow-Up Trim
This setting configures the Follow-Up Trim behavior.
| Strategy | Description |
|---|---|
| Off | Trim Release must be used to update AFCS attitude setpoints. |
| Hover | Hands On detection in hover domain will result in updating AFCS attitude setpoints. |
| Cruise | Hands On detection in cruise domain will result in updating AFCS attitude setpoints. |
| Both | Hands On detection in both hover and cruise domain will result in updating AFCS attitude setpoints. |
# Cyclic Displace Center-Reset-Time
This setting configures how long the cyclic is disabled after the Displace-Center binding function is used.
# Collective Inc/Dec Step Size
This setting configures how much collective is added or remove when clicking increment/decrement buttons. This does not apply when using an axis binding.